

RESEARCH OF THE OMNIDIRECTIONAL PROPULSION TECHNOLOGY FOR THE DEEP-SEA MOVABLE PLATFORM
-
摘要:
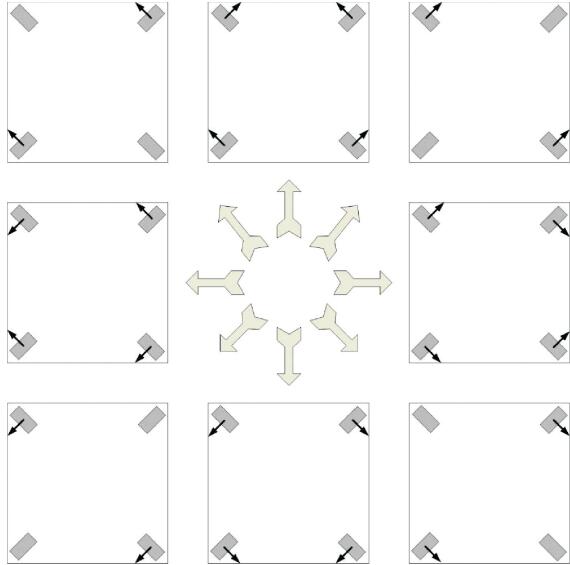
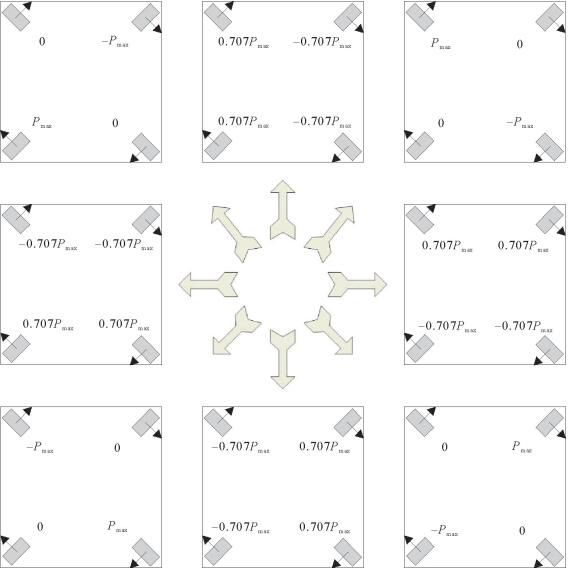
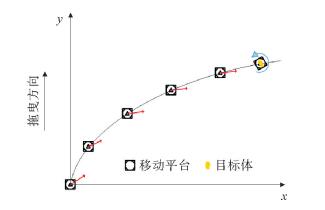
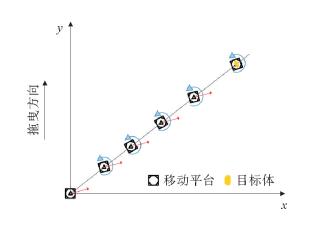
深海可移动平台是青岛海洋地质研究所针对大洋地质调查过程中提出的精准取样、定点投放等新需求, 创新研发的新一代通用型深海地质调查装备。全向推进系统是该平台的核心关键技术之一。笔者从工作实际需求出发, 阐述了深海可移动平台的整体设计思路;通过对平台整体的数学建模与力学分析, 给出了平面全向推进系统的数理模型;根据不同参数与控制变量, 模拟了大洋地质调查过程中全向推进系统的仿真结果。
Abstract:The Deep-sea Movable Platform is a new generation of multi-purpose deep-sea survey equipment innovatively developed by Qingdao Institute of Marine Geology in response to the new requirements of precise sampling and fixed-point sample delivery during oceanic geological survey. The omnidirectional propulsion system is one of the key techniques of the platform. This paper elaborated the general idea of design for the deep-sea movable platform. Through mathematic modeling and mechanical analysis of the platform, the mathematical and physical models of the planar omnidirectional propulsion system is presented. According to different parameters and control variables, the simulation results of the omnidirectional propulsion system in the process of simulating oceanic geological survey are discussed.
-

-
[1] 杨楠,任旭光,王俊珠,等.深海移动电视抓斗海洋地质调查中的应用[J].机械工程与技术,2018,7(5):309-315. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=HANS201811210244
[2] 吴志强,陈建文.OBS在我国海洋深部地质调查中的应用现状和前景[J].海洋地质动态,2008,24(9):35-42. doi: 10.3969/j.issn.1009-2722.2008.09.007
[3] Huehnerbach V, Murton B, Berndt C, et al. HyBRIS-a low cost, multi-purpose, modular vehicle for detailed ocean mapping[C]∥AGU Fall Meeting. AGU Fall Meeting Abstracts,2013.
[4] Murton B, Copley J, Connelly D. Hydrothermal ventsat 5000 m on the Mid-Cayman Rise: where basement lithology and depth of venting controls sulphide deposit composition[C]∥Oceans.IEEE,2011:1-4.
[5] 张琼芳,倪凯,王晓浩.深海作业抓斗式采样器结构的优化设计[J].工具技术,2018,52(5):73-77. doi: 10.3969/j.issn.1000-7008.2018.05.017
[6] 林西强.水下推进器运动的自适应滑动控制[J].力学与实践,1999(1):31-33. doi: 10.3969/j.issn.1000-0879.1999.01.009
[7] 王广义.水下推进器的自适应PID控制[D].青岛:中国海洋大学,2007.
http://d.wanfangdata.com.cn/thesis/Y1337191 [8] 薛志斌,罗才宝.水下推进器控制系统设计[J].计算机仿真.2015,32(5):407-410. doi: 10.3969/j.issn.1006-9348.2015.05.091
[9] 衣大勇.基于摆线运动规律的全方向水下推进器机构设计与仿真[D].哈尔滨:哈尔滨工程大学,2008.
http://d.wanfangdata.com.cn/thesis/Y1437319 [10] 张泽.基于DSP的水下移动平台图像处理系统研究[D].秦皇岛:燕山大学,2013.
http://cdmd.cnki.com.cn/Article/CDMD-10216-1013028599.htm -
 下载:
下载:

图(9)
计量
- 文章访问数: 563
- PDF下载数: 57
- 施引文献: 0