

Application of AR technology for underwater positioning and survey
-
摘要:
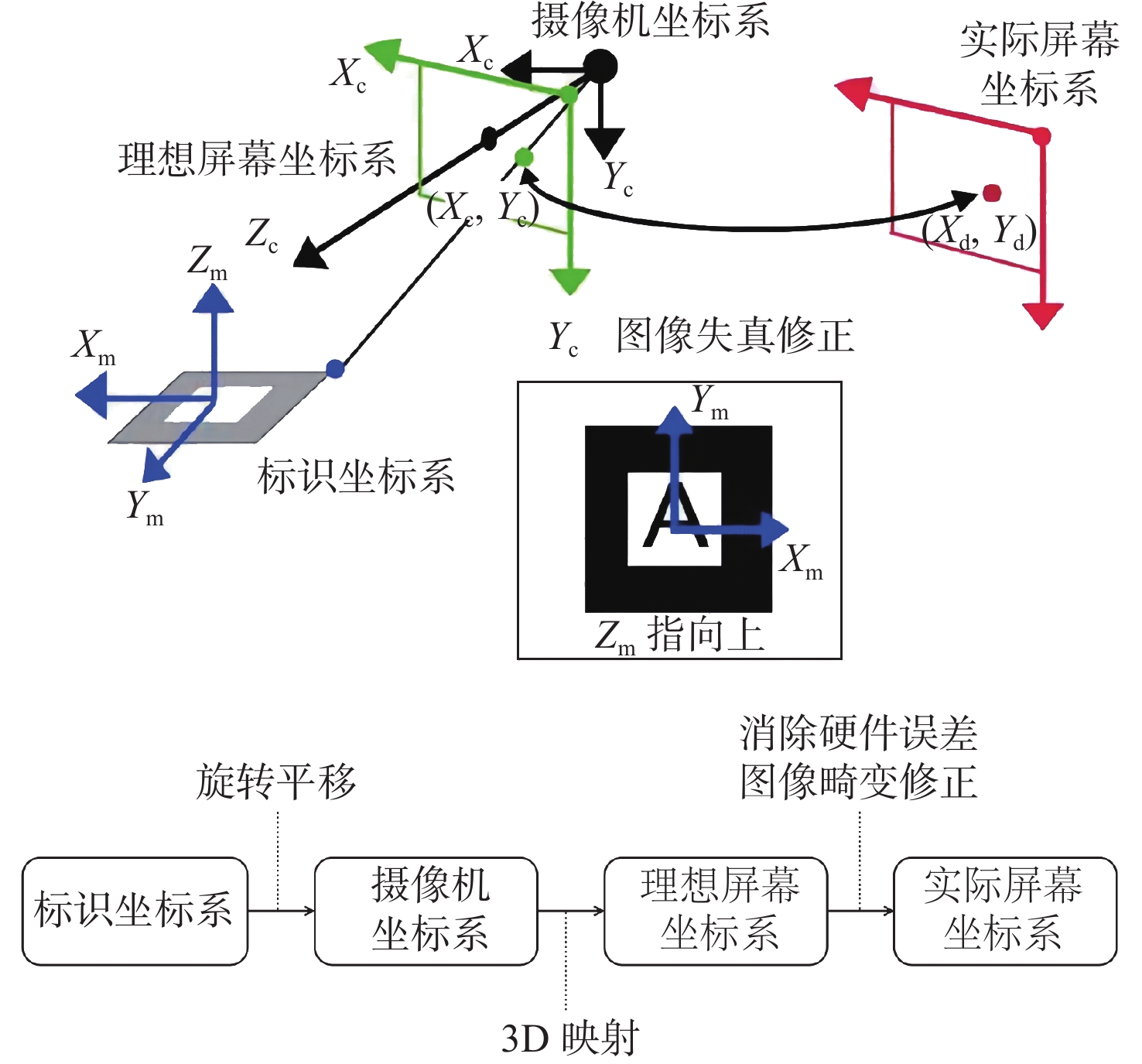
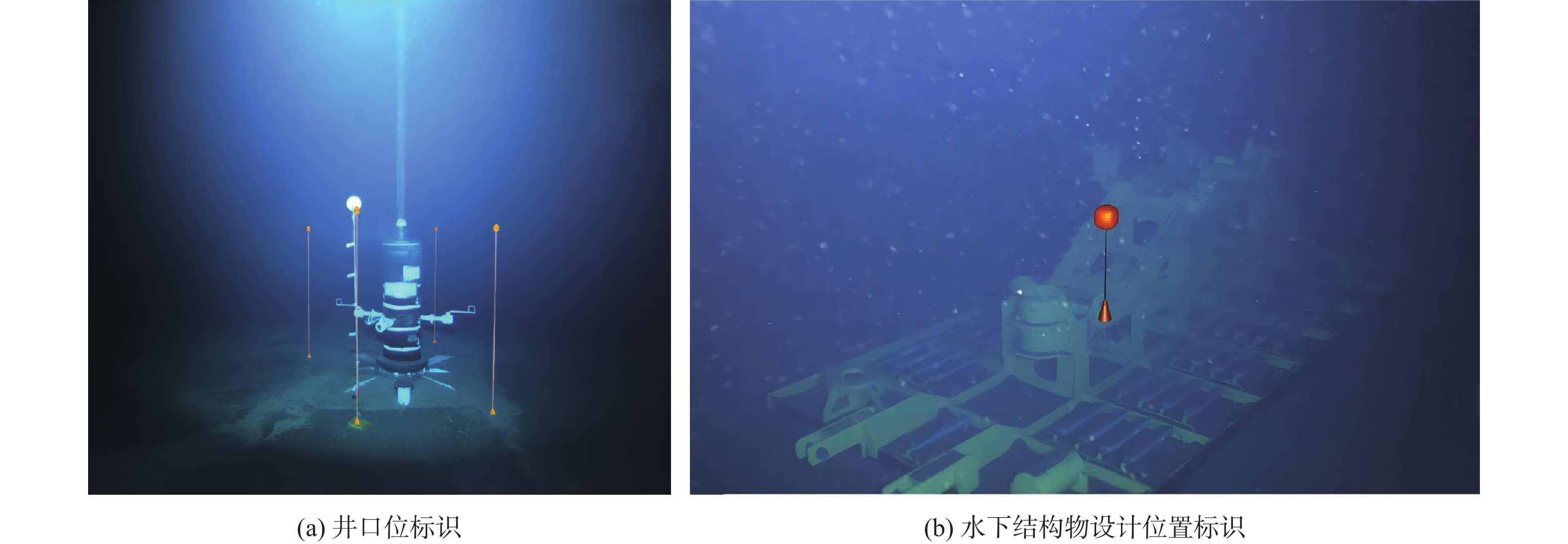
增强现实(AR)技术是应用领域非常广泛的新技术,涉及社会生活的多个领域,如医学、军事、交通、教育、娱乐、工业机械、景观规划、文物保护等,目前也已应用到水下工程中。本研究中AR技术首次成功应用到国内海洋工程水下定位测量作业中,以遥控水下机器人(ROV)为载体,搭载3D水下摄像机并配备相关水下传感器,通过专用AR软件将结构物三维模型、虚拟标识物、虚拟测量工具叠加到从水下传到水面的视频画面中,实现了水面操作人员与水下真实环境的实时交互,从而实时监测水下结构物的位置和姿态。将AR技术应用于水下定位测量,突破了传统的作业模式,具有高精度、高效率、低成本、无接触式和实时测量的优势特点,ROV不用紧贴结构物,软件操作便捷、测量数据精度可靠且实时显示,有效降低ROV的作业风险,提高作业时效。
Abstract:Augmented Reality (AR) is a new technology for a wide range of applications, which involves many areas of social life, such as medicine, military, transportation, education, entertainment, industrial machinery, landscape planning, cultural relic protection, etc., and has also been applied for underwater engineering at present. AR has been successfully applied for underwater positioning and survey in ocean engineering for the first time in China. An ROV (remotely operated vehicle) is equipped as a carrier with a 3D camera and relevant underwater sensors. Through the unique AR software, the structural 3D model, virtual markers, and virtual measurement tools could be superimposed onto the video images transmitted from underwater to the ground surface, with which the real-time communication between the operators on the ground and the real underwater environment and real-time monitoring on position and attitude of underwater structures could be realized. The application of AR in underwater positioning and survey breaks by traditional operation method showed high precision, high efficiency, low cost, non-contact, and real-time measurement. In addition, the ROV does not need to cling to the structure, the software is easy to operate, the measurement data are reliable and real-time display, which could effectively reduce the operation risk of ROV and improve the working efficiency.
-

-
表 1 3D摄像机指标参数
Table 1. Specification of the 3D camera
性能参数 机械/电子参数 色彩 彩色显示 重量 4.1 kg(空气中),2.1 kg(水中) 焦距 6 mm或8 mm 功率(3D摄像机) 8-30V DC @ <5 W 传感器尺寸 8.45 mm × 7.05 mm (2/3") 功率(IMU) 8-30V DC @ <2 W 分辨率 2 464 × 2 056像素 数据传输(3D摄像机) 以太网1 000BaseT全双工自动MDIX 帧率 23 Hz(最大) 数据传输(IMU) RS422全双工9 600 bps 视角 71°× 61°或56°× 47°
(水平×垂直)工作深度 最深6 000 m 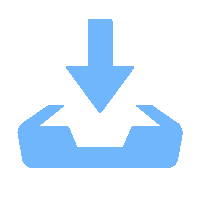 下载: 导出CSV
下载: 导出CSV
表 2 采用的USBL与LBL定位系统对比
Table 2. Comparison between USBL and LBL positioning systems that used
系统型号 基线长度/m 设备构成 定位方式 定位精度 精度特点 校准方式 Sonardyne Ranger2
USBL<1 换能器、信标、姿态传感器、声速剖面仪、水面控制单元 采用测量水下目标与测量船之间的相对距离与方位的模式进行定位 斜距×0.27% + 水面定位精度(1 000 m水深内< 2.7 m) 定位精度随着水深增加而降低 静态校准和动态校准 Sonardyne Fusion 6G
LBL100~6 000 换能器、智能信标、信标浮体及支架、水面控制单元 通过布设在海底的基阵进行精确定位 <0.5 m + 水面定位精度 定位精度与水深无关 基阵校准
下载: 导出CSV
表 3 采用USBL与QV定位测量比对
Table 3. Comparison of positioning data obtained by QV when using USBL
水下结构物1 水下结构物2 东向/m 北向/m 艏向/(°) 东向/m 北向/m 艏向/(°) 设计位置 XXX X83.41 X XXX 551.88 156.5 XXX X57.56 X XXX 276.51 231.1 USBL定位 XXX X83.82 X XXX 551.54 157.6 XXX X57.33 X XXX 276.79 234.4 QV定位 XXX X82.35 X XXX 553.07 157.2 XXX X55.19 X XXX 278.70 233.7 QV与USBL测量差值 1.47 1.53 0.4 2.14 1.91 0.7 注:XXX X代表东向坐标前4位数字,X XXX代表北向坐标前4位数字。
下载: 导出CSV
表 4 采用LBL与QV定位测量比对
Table 4. Comparison of positioning data obtained by QV when using LBL
水下结构物3 水下结构物4 东向/m 北向/m 艏向/(°) 东向/m 北向/m 艏向/(°) 设计位置 XXX X26.29 X XXX 043.35 291.1 XXX X17.21 X XXX 023.00 293.9 LBL定位 XXX X25.94 X XXX 043.61 289.5 XXX X17.39 X XXX 023.26 299.4 QV定位 XXX X25.76 X XXX 043.69 288.3 XXX X17.56 X XXX 022.95 298.0 QV与LBL测量差值 0.18 0.08 1.2 0.17 0.31 1.4 注:XXX X代表东向坐标前4位数字,X XXX代表北向坐标前4位数字。
下载: 导出CSV
-
[1] 范刚,张亚,赵河明,等. 水下机器人定位导航技术发展现状与分析[J]. 兵器装备工程学报,2022,43(3):22-29. doi: 10.11809/bqzbgcxb2022.03.003
[2] 石腾. 水下机器人短基线定位系统设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2018.
[3] 金博楠,徐晓苏,张涛,等. 超短基线定位技术及在海洋工程中的应用[J]. 导航定位与授时,2018,5(4):8-20. doi: 10.19306/j.cnki.2095-8110.2018.04.002
[4] 狄冰,高辉,徐亚国. 长基线定位系统在海洋油气开发中的应用[J]. 北京石油化工学院学报,2015,23(4):35-39. doi: 10.3969/j.issn.1008-2565.2015.04.008
[5] 张同伟,秦升杰,唐嘉陵,等. 深海长基线定位系统现状及展望[J]. 测绘通报,2018,10:75-78,106. doi: 10.13474/j.cnki.11-2246.2018.0319
[6] 李璇,解禹. 水下定位导航系统展望[J]. 无人系统技术,2022,5(3):79-86. doi: 10.19942/j.issn.2096-5915.2022.3.029
[7] PARENTE M, STEVENS M, FERREIRA J, et al. Subsea digitalization: from the virtual world into the real world—using Augmented Reality in offshore operations[C]//Houston:Offshore Technology Conference, 2019.
[8] CHOI S,PARK J S. Development of Augmented Reality system for productivity enhancement in offshore plant construction[J]. Journal of Marine Science and Engineering,2021,9(2):209. doi: 10.3390/jmse9020209
[9] 邱博文. 基于二维码标识的增强现实系统的设计与实现[D]. 西安: 西安电子科技大学, 2014.
[10] BOONBRAHM S,BOONBRAHM P,KAEWRAT C. The use of marker-based Augmented Reality in space measurement[J]. Procedia Manufacturing,2020,42:337-343.
[11] BRUNO F,BARBIERI L,MANGERUGA M,et al. Underwater Augmented Reality for improving the diving experience in submerged archaeological sites[J]. Ocean Engineering,2019,190:106487.
[12] ISHIDA M, SHIMONOMURA K. Marker based camera pose estimation for underwater robots[C]//2012 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2012: 629-634.
[13] HENRIKSEN E H, SCHJøLBERG I, GJERSVIK T B. Vision based localization for subsea intervention[C]//International Conference on Offshore Mechanics and Arctic Engineering.Trondheim: American Society of Mechanical Engineers, 2017, 7: V07AT06A023.
[14] 刘佳,郭斌,张晶晶,等. 视触觉融合的增强现实三维注册方法[J]. 计算机工程与应用,2021,57(11):70-76. doi: 10.3778/j.issn.1002-8331.2005-0160
[15] 黄明泉,徐景平,施林炜. ROV在海洋油气田开发中的应用及展望[J]. 海洋地质前沿,2021,37(2):77-84. doi: 10.16028/j.1009-2722.2020.030
-








图(11)
表(4)
计量
- 文章访问数: 586
- PDF下载数: 96
- 施引文献: 0